|
I am a 3rd-year(last-year) PhD student at MIT EECS, advised by Prof. Bill
Freeman. Before that, I get my MS in Robotics at CMU, supervised by Prof.
Srinivasa Narasimhan, and my undergraduate in Peking
University, working with
Prof. Zhanxing Zhu,
Dr. Xiangyu Zhang,
and
Prof. Hang Zhao.
Email: tianyuan [at] mit [dot] edu I acknowledge that information asymmetry can significantly hinder research opportunities for junior students. If you're interested in chatting about life, research, or potential collaborations, feel free to email me. |

|
|
I have had research experience in machine learning, physiscs-based vision, computational imaging and
computer graphics.
|
|
|
Tianyuan Zhang, Sai Bi, Yicong Hong, Kai Zhang, Fujun Luan, Songlin Yang, Kalyan Sunkavalli, William T. Freeman, Hao Tan arxiv, 2025 (New) project page / paper / code Hardware-friendly Test-Time Training boosts FLOPs utilization by 10x, facilitates larger nonlinear state and advanced optimizers, and can be implemented in PyTorch with just a few lines of code. Validated on novel view synthesis, language models, and AR video diffusion. |

|
Ziqi Pang*, Tianyuan Zhang*, Fujun Luan, Yunze Man, Hao Tan, Kai Zhang, William T. Freeman, Yu-Xiong Wang CVPR, 2025 (Oral Presentation) project page / paper / github Next-token prediction in random orders for images. |
|
|
Tianyuan Zhang, Zhengfei Kuang, Haian Jin, Zexiang Xu, Sai Bi, Hao Tan, He Zhang, Yiwei Hu, Milos Hasan, William T. Freeman, Kai Zhang, Fujun Luan ICLR, 2025 (Spotlight) project page / paper We build a probabilistic inverse rendering model that reconstrcts and relights 3D objects with sparse input views. GPUs learn algorithms! |
|
|
Haian Jin, Hanwen Jiang, Hao Tan, Kai Zhang, Sai Bi, Tianyuan Zhang, Fujun Luan, Noah Snavely, Zexiang Xu ICLR, 2025 (Oral Presentation) project page / paper / code Posed Novel view synthesis with minimal 3D inductive bias. |

|
Tianyuan Zhang, Hong-Xing (Koven) Yu, Rundi Wu, Brandon Y. Feng, Changxi Zheng, Noah Snavely, Jiajun Wu, William T. Freeman. ECCV, 2024 (Oral Presentation) project page / github / paper We bring static 3D objects to life by distilling material parameters from video generation models. |
|
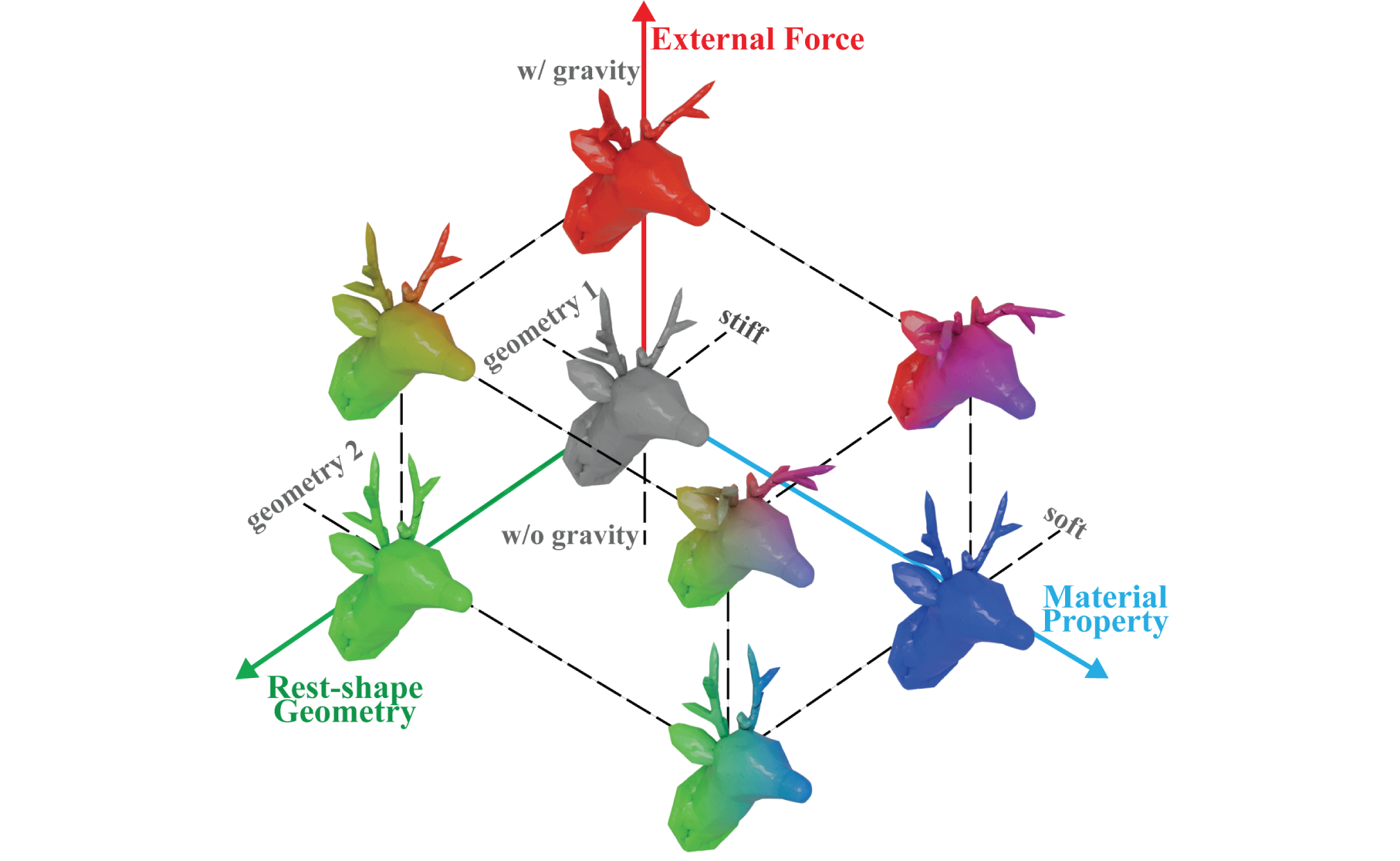
Minghao Guo, Bohan Wang, Pingchuan Ma, Tianyuan Zhang, Crystal Elaine Owens, Chuang Gan, Joshua B. Tenenbaum, Kaiming He, Wojciech Matusik NeurIPS, 2024 (Spotlight) project page / paper / Recostruct 3D physical objects from single images by considering mechanical properties, external forces, and rest-shape geometry. |
|
Tianyuan Zhang, Mark Sheinin, Dorian Chan, Mark Rau, Matthew O'Toole, Srinivasa G. Narasimhan. CVPR, 2023 project page / github / paper / videos We image the "ripples" on solid surfaces caused by physical impacts, which contain information about the object's physical properties and its interaction with the environment. We showcase non-line-of-sight impact localization capabilities. |

|
Zhewei Huang, Tianyuan Zhang, Wen Heng, Boxin Shi, Shuchang Zhou ECCV, 2022 github / arXiv / demos We propose a real-time intermediate flow estimation (RIFE) method for video frame interpolation, it runs 30+FPS for 2X 720p interpolation on a 2080Ti GPU |
|
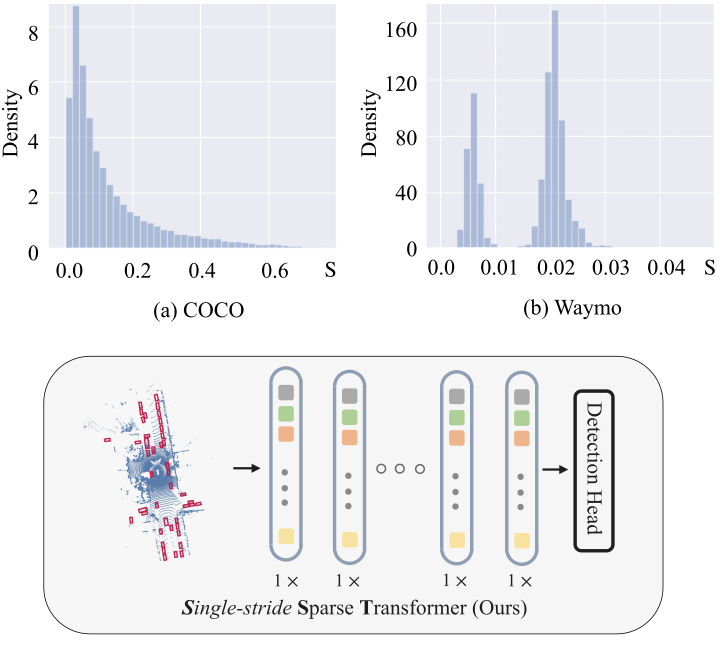
Lue Fan, Ziqi Pang, Tianyuan Zhang, Yu-Xiong Wang, Hang Zhao, Feng Wang, Naiyang Wang, Zhaoxiang Zhang CVPR, 2022 github / arxiv / In contrast to 2D, object size in 3D does not exhibit long-tail distributions. We propose a single stride sparse Transformer (SST) for 3D object detection. We obtained impressive results on small objects |

|
Yue Wang, Vitor Guizilini*, Tianyuan Zhang*, Yilun Wang, Hang Zhao, Justin Solomon CoRL, 2021 github / arxiv / A new paradigm of 3D object detection from multiview 2D images |
|
Tianyuan Zhang, Xuanyao Chen, Yue Wang, Yilun Wang, Hang Zhao preprint, 2022 project page / github / arXiv End-to-End 3D tracking with multiview-cameras |
|
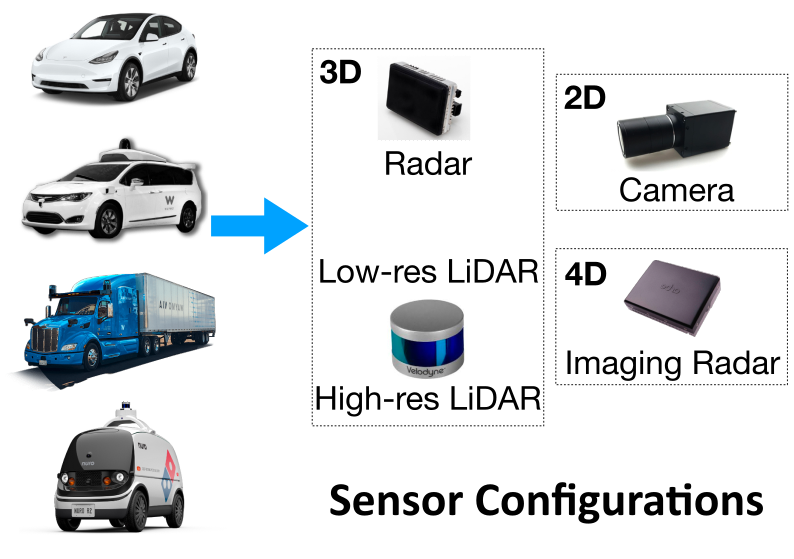
Xuanyao Chen, Tianyuan Zhang, Yue Wang, Yilun Wang, Hang Zhao preprint, 2022 project page / github / arXiv A unified framework for 3D detection from multi-sensor data. We achieved impressive results with multiview-cameras and one-beam LiDAR. |

|
Shuai Shao*, Zeming Li*, Tianyuan Zhang*, Chao Peng*, Gang Yu, Xiangyu Zhang, Jing Li, Jian Sun ICCV, 2019 project page / paper We provide a high-quality large-scale object detection dataset, with 365 categories, 638K images, and 10,101K bounding boxes |
|
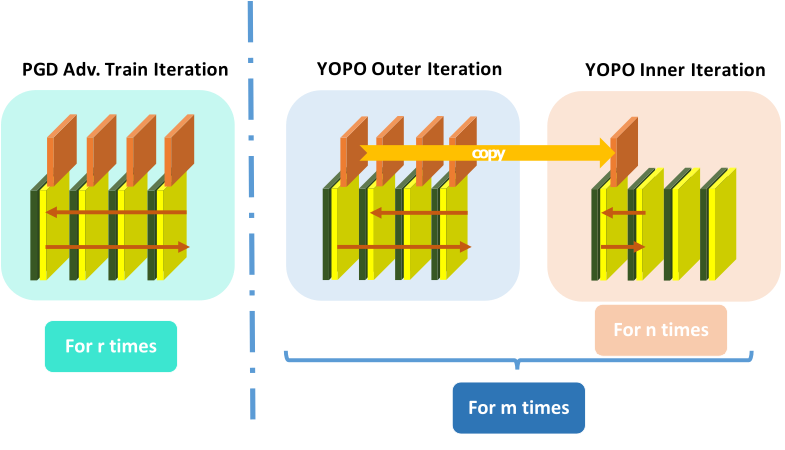
Dinghuai Zhang*, Tianyuan Zhang*, Yiping Lu*, Zhanxing Zhu, Bin Dong NeurIPS, 2019 arXiv / code Accelerating adversarial training using Pontryagin`s Maximum Principle |
|
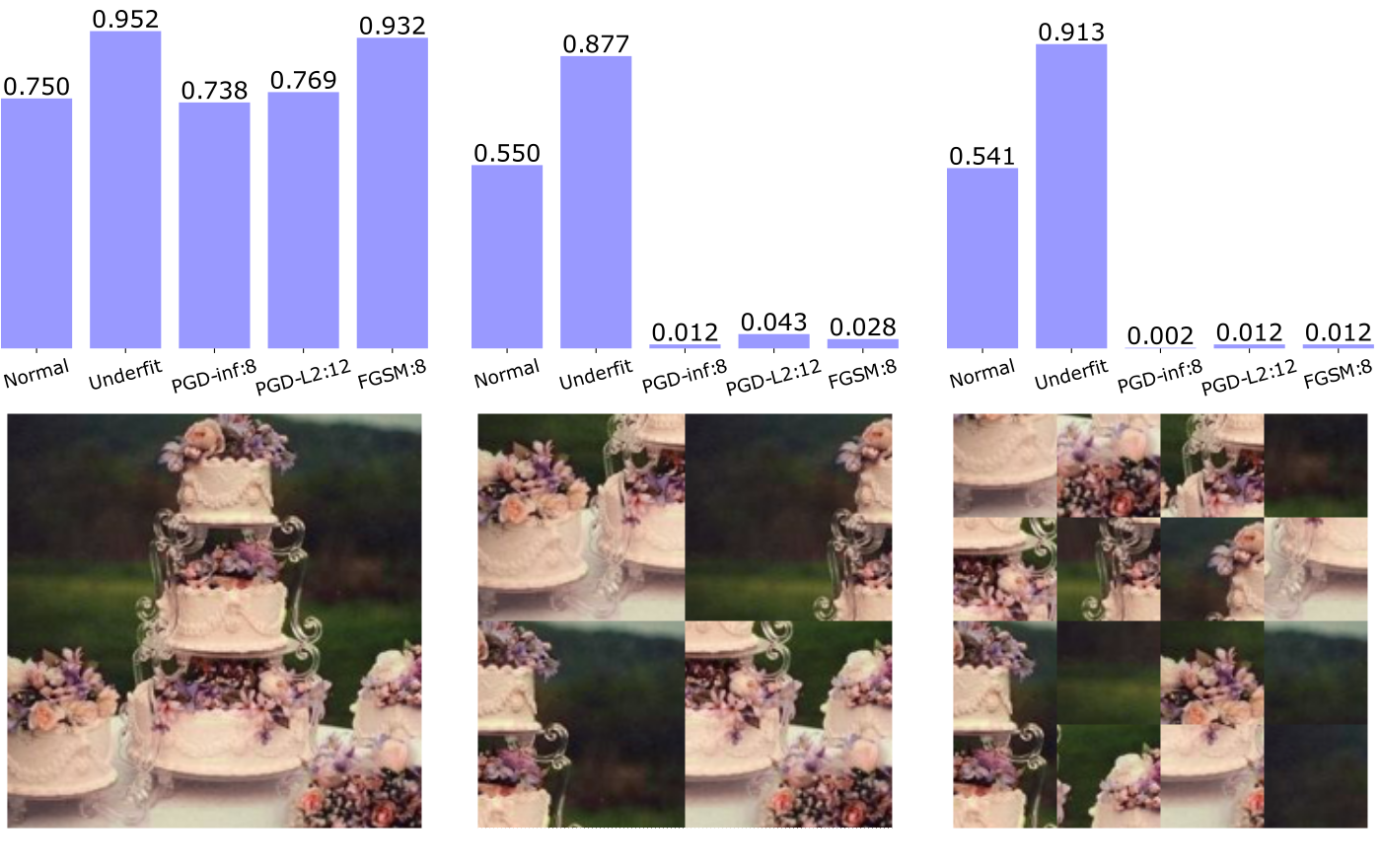
Tianyuan Zhang, Zhanxing Zhu ICML, 2019 github / arXiv Discussion on the shape-bias and texture-bias of adversarially trainined convolutional neural networks |
|
Reviewer: CVPR' 2021,23, NeurIPS' 2020, ICLR' 2021,22,23 BlogPosts. |
|
Updated at Oct. 2025
Template for photography page comes from this amazing guy
|